路径规划-LPA_Star
路径规划之 LPA_Star (LPA*)
LPA*是 A*的增量版本. 相比于 A*算法, 首次规划时, 两者过程类似. 假如地图发生变化, A*算法需要重新规划路径. 而 LPA*算法可以通过在当前搜索期间内更新前一次搜索的 g 值(距起始距离)来适应地图变化而无需重新计算整个地图。
算法描述
局部连续(Locally Consistent):$g(s)=rhs(s)$。当所有节点均为局部连续状态时,g(s)的值等于 s 到起始点的最短距离(注意,反向不成立)。这个概念很重要,当上述条件满足时,我们可以找到任意一点 u 到起始点的最短路径,假设当前位置为 s,父辈节点 s’(向着起始点前进的下一个节点)通过最小化(g(s’)+c(s,s’))来获得,不断重复直到到达 sStart。然而,LPA*并不需要使所有节点均为局部连续状态,它通过启发式搜索将关注点放在搜索上,并且只更新那些与计算最短路径相关的节点的 g 值。
局部过连续(Locally Overconsistent):$g(s)>rhs(s)$。当优先队列 U 中取出的节点为局部过连续状态时,意味着 g(s)可以通过父辈节点使自己到起点的路径更短,此时将设置 g(s)=rhs(s),节点状态变为局部连续状态。
局部欠连续(Locally Underconsistent):$g(s)<rhs(s)$。这种情况通常出现在父辈的某一节点突然变为障碍的情况下,造成父辈节点到起点的路径变大,从而需要修改 g(s)的值,如果节点处于这种状态,则当它由优先队列中取出时,将其 g 值设置为无穷大,即将该节点状态变为局部过连续,而局部过连续的点将会被再次添加到优先队列中,这样就可以在它下次被取出时将其作为局部过连续状态处理,最终达到局部连续状态(如果这一节点与我们要搜索的最短路径相关的话)。
LPA*维持着每个节点的到起点的估计距离: $g(s)$ 首次搜索时, $g(s)$ 的计算方式和 A*相同, 并将这个值带到下次搜索过程中.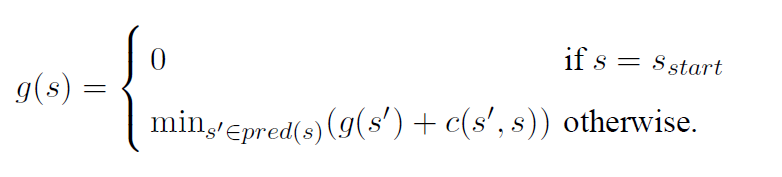
此外 LPA*还维护着一个基于 $g(s)$ 的前瞻估计距离: $rhs(s)$.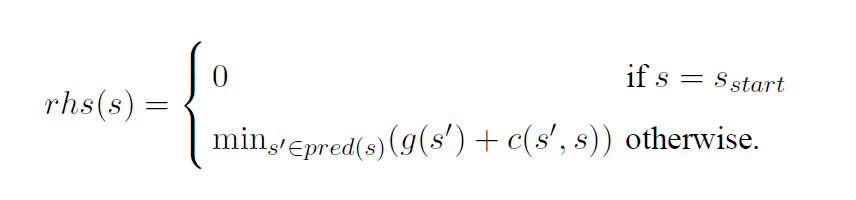
A*算法维护着 OPEN 和 CLOSED 列表来避免节点被重复搜索. LPA*通过检查局部一致性来避免节点重复搜索, 不需要维护 COLSED 列表. OPEN 列表是一个优先队列, 使得 A*可以通过队列中具有最小 $f(s)$ 值的节点来进行边的扩展. LPA*也维持着一个只包含局部欠一致(locally inconsistent)节点的优先队列. 优先队列根据节点的 keys 值排列(相当于 A*的 $f(s)$ 值排列). 该 keys 是一个二维变量:
$k(s)=[k1(s),k2(s)]$
其中:
$k1(s)=min(g(s),rhs(s)+h(s))$, 相当于 A*的$f(s)$ > $k2(s)=min(g(s),rhs(s))$, 相当于 A*的$g(s)$
定义: $k(s1) \leq (s2)$ 为 $k1(s1) \leq k1(s2)$ 或者 $(k1(s1)=k1(s2) \text{ and }k2(s1) \leq k2(s2))$
伪码
算法伪码如下图所示 Algorithms LAP*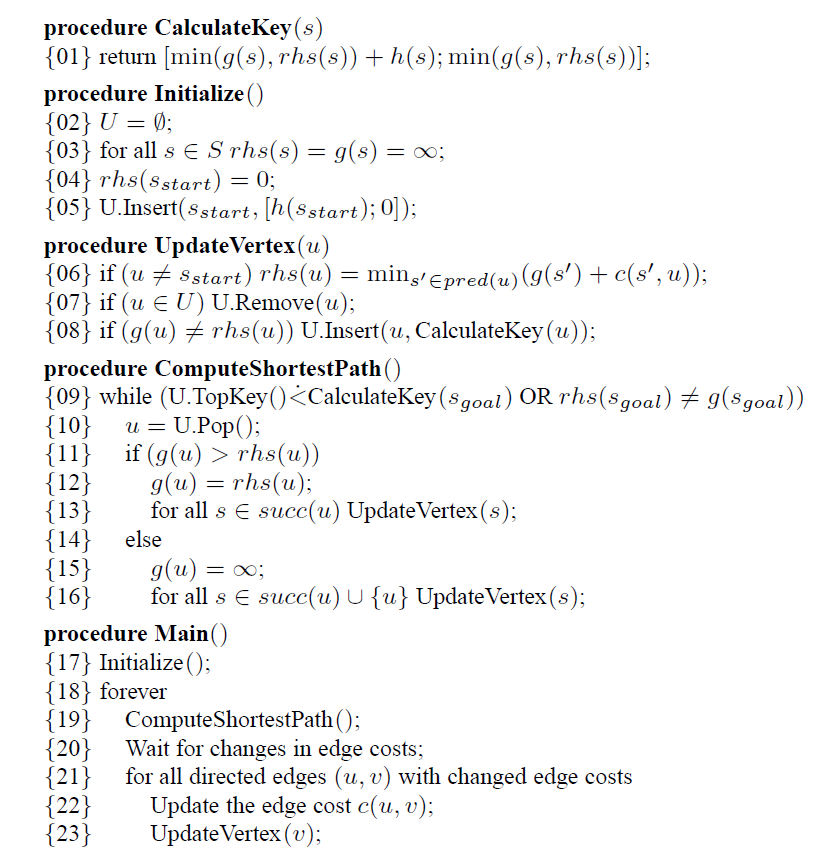
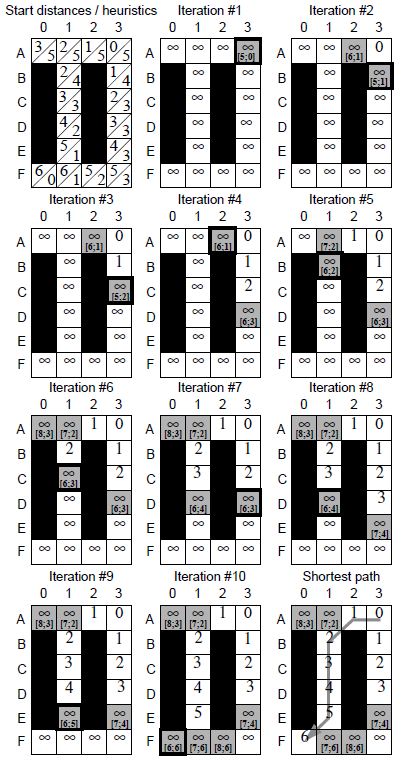
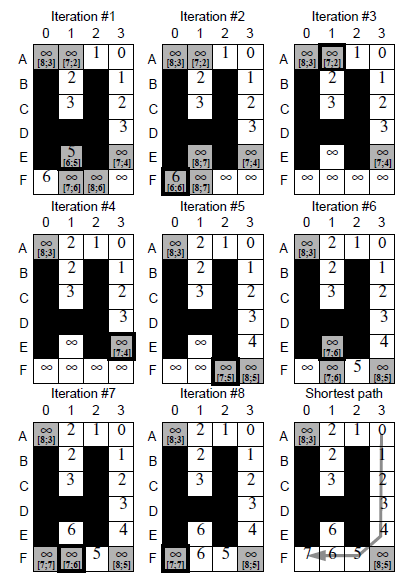
图解
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
流程
初始化
LPA_STAR.__init__: 初始化地图,对地图图片二值化处理,网格节点划分,若网格内包含障碍物,则该网格节点标记为障碍物:Node.is_obs = True输入需要随机产生的障碍物网格个数(可选);
Initialize(): 初始化所有节点的$g(s)=\infin$, $rhs(s)=\infin$, 实际实现中,不需要初始化所有节点,只需要在遇到一个新节点时初始化该节点. 起点$s_{start}$是一个局部欠一致节点, 计算$keys(s_{start})$, 并将节点$s_{start}$放入优先队列中.初始化
Initialize()保证了首次调用ComputeShortestPath()是一个 A*算法。等待地图更新, 这里通过用户输入障碍物网格数来模拟地图更新。
地图更新时,导致节点之间的距离
DistanceCost发生变化, 调用UpdateVertex(s)更新受影响节点参数rhs和keys。这也这些节点和优先队列之间的联系也发生变化,可能成为局部一致或者局部不一致状态。重新调用
ComputeShortestPath()来根据优先队列顺序展开局部不一致的节点。如果展开的节点处于局部过一致(
locally overconsistent)状态, 即$g(s)>rhs(s)$, 那么将该节点设置为局部一致(locally consistent), 即$g(s)=rhs(s)$。如果展开的节点处于局部欠一致(
locally underconsistent)状态,即$g(s)<rhs(s)$, 那么将该节点的g值设置为无穷大, 即$g(s)=\infin$上述两种情况中受该展开节点的
g值变化会影响后置节点,所以还需要更新受其影响的节点,调用UpdateVertex(s)来更新。
LPA*扩展停止条件为:目标节点$s_{goal}$处于局部一致并且下一个待展开的节点
keys值不小于$s_{goal}$的keys值。若搜索结束之后目标节点$s_{goal}$的g值为无穷大,那路径不存在。将目标节点$s_{goal}$的后置链表反转即可得到$s_{start}$到$s_{goal}$的路径
实现
数据结构
1 | class Node(object): |
接口
1 | ''' |
Planning
1 |
|
本文标题:路径规划-LPA_Star
文章作者:xwnb
发布时间:2020-06-20
最后更新:2023-04-17
原始链接:https://xwnb.github.io/posts/367356294/
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!并保留本声明。感谢您的阅读和支持!
分享